
ZMP/QMP 到 RMP
习如何从 ZMP/QMP SynqNet 移植到 RMP EtherCAT® 运动控制器
概述
了解为什么移植到 RMP EtherCAT® 运动控制器将使您受益
随着 ZMP 和 QMP SynqNet 卡的过时,OEM 可以移植到 RMP EtherCAT® 软运动控制器 正在使用当前使用的 MPI API 编译的代码。RMP EtherCAT® 运动控制器使用与 ZMP 和 QMP SynqNet 卡相思的运动固件相同。大多数数软件工具保持不变。转换为 RMP 可显著著作短期缩小习曲线,并使 OEM 能够 OEM 能获得多年的开发成果。
移植到 RMP EtherCAT® 的一些优点:
1。硬件
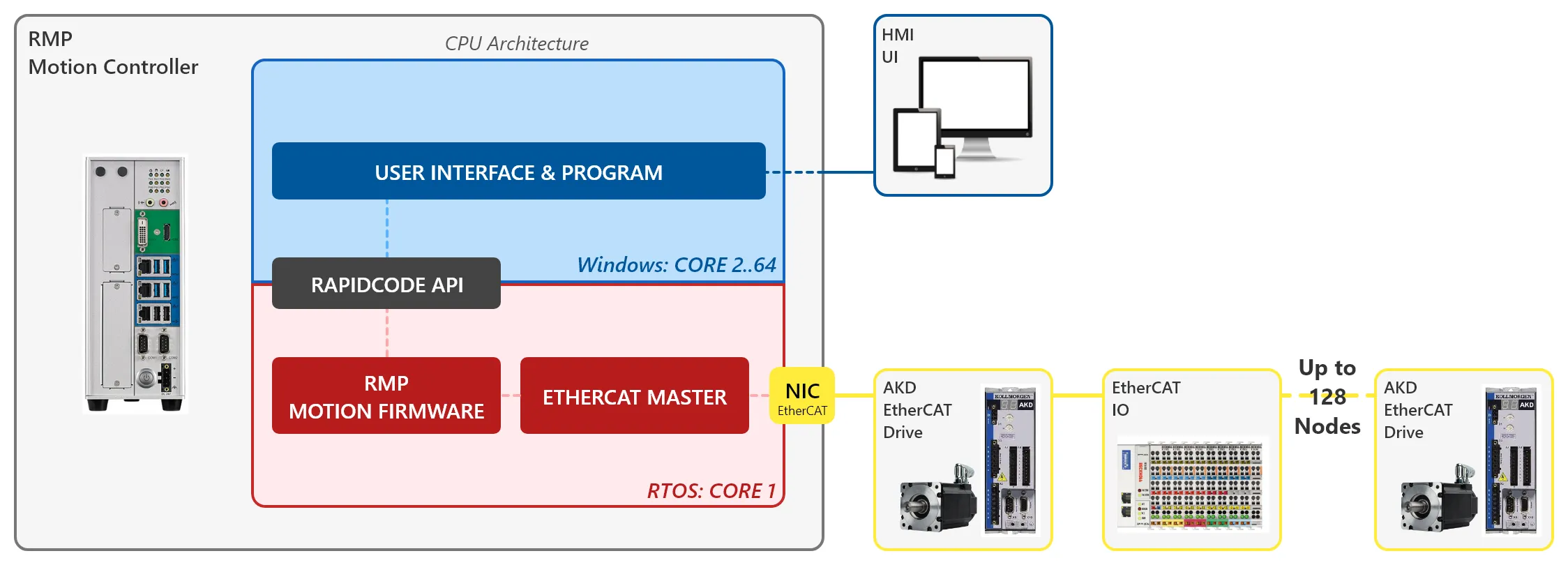
RMP® 是基于软件的运动控制器,可在标准工业电脑上运行硬件。因此,无须担保中心组装或控制器硬件会过时。
2。性能
大多数 OEM 在位置回复路中使用驱动器运行 RMP。闭合在一起 EtherCAT® 驱动器中的位置回归效果更好,因为驱动器插件的值也很高。SynqNet 关注了我们的控制器中那些回归路。正因为如此,在轴数比较高的情形下,必然会让 Synqnet 控制器的采样率设置得更低,这会导致闭电机反馈时系统性能降低。
3.特征
RMP 运动固件与 ZMP/QMP SynqNet™ 卡相似之处。正因为如此,OEM 可以使用经过测试和验证的相机功能集。
4。软件 API
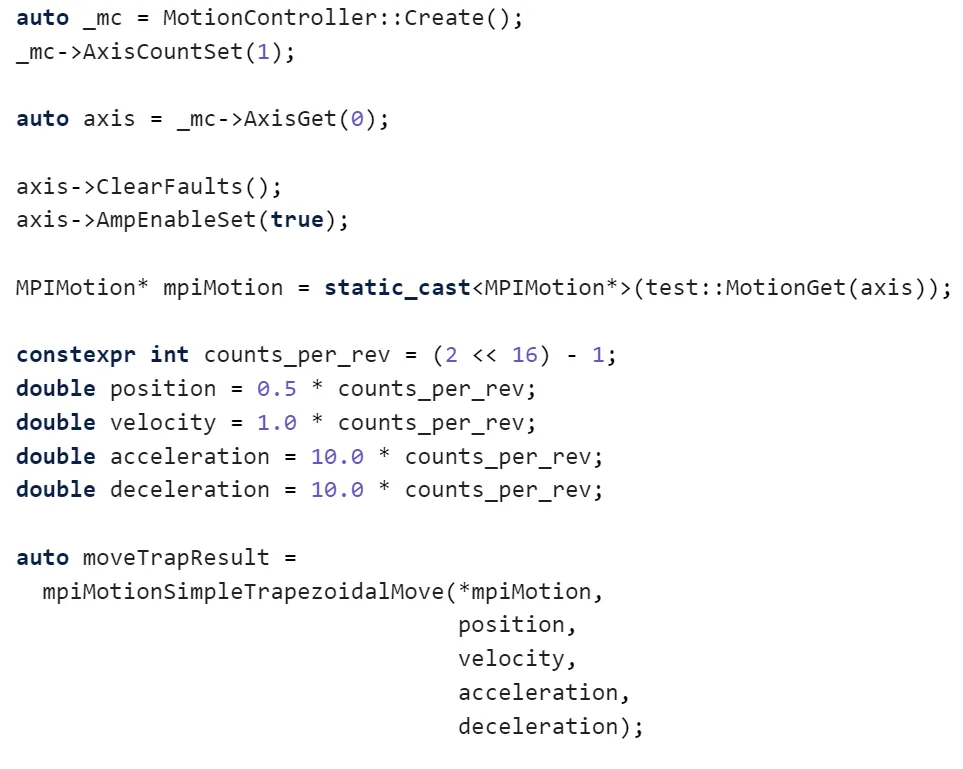
RMP EtherCAT® 支持 MPI API(C 语言)。当前的 SynqNet™ OEM 可以利用 MPI,毫不费力地利利用现代流行的通信(EtherCAT®)。
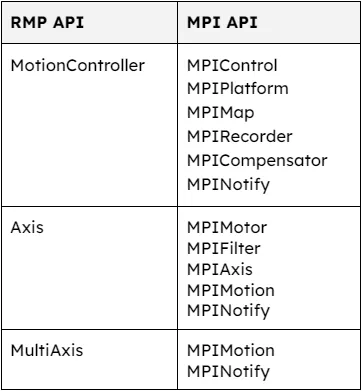
机器人的大片段源码将保持不变。移植到 RMP EtherCAT® 的主要更新将发生在网络初始化并归位上。右边是使用 RMP EtherCAT® 运动控制器支持的 MPI 对象的列表。
一台机器人的软件由成千上万行代码组合而成,其中很大一部分代码与运动和 IO 有关。此代码至为关键,因为实现代码需要实际的硬件测试并同时完成所有不同的部分。ROBTVINPROCESUFFER,必需的运动和 IO 代码不会被改动,而与前端用户界面相关的代数通常会添加新功能的代码并获得增强。
重写机器人的所有运动和 IO 代码通常需要 12-18 个月。了解全新运动控制器的功能/工具,以及如何使用各种函数调用非常耗时。
RMP 的 RapidCode 还支持其他语言,例如 C++、C# 和 VB。网。对于 Windows 程序员来说,利用 RapidCodeRemote gRPC 服务使 OEM 能使用更多语言,例如 Python、Java、Ruby、Dart 等。
5。软件工具
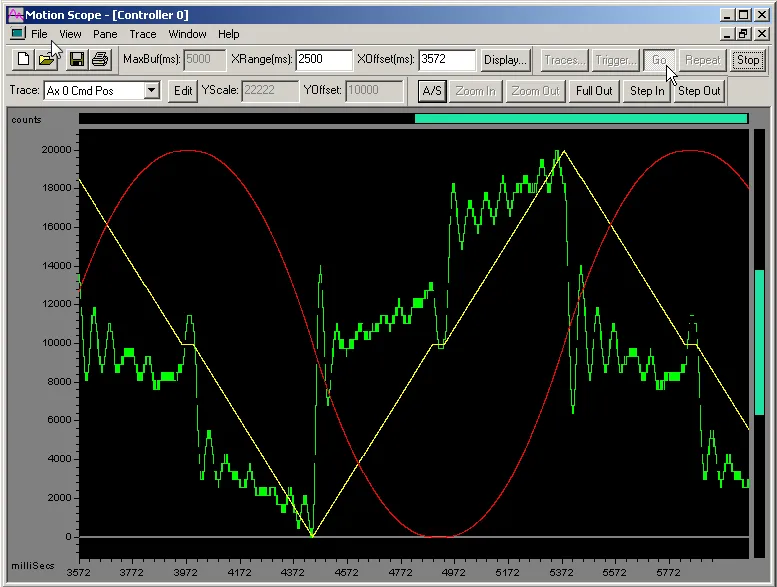
诸如MotionScope和BodeTool之类的宝贵工具保持不变,从而缩短了工程师和技术人员的学习时间。
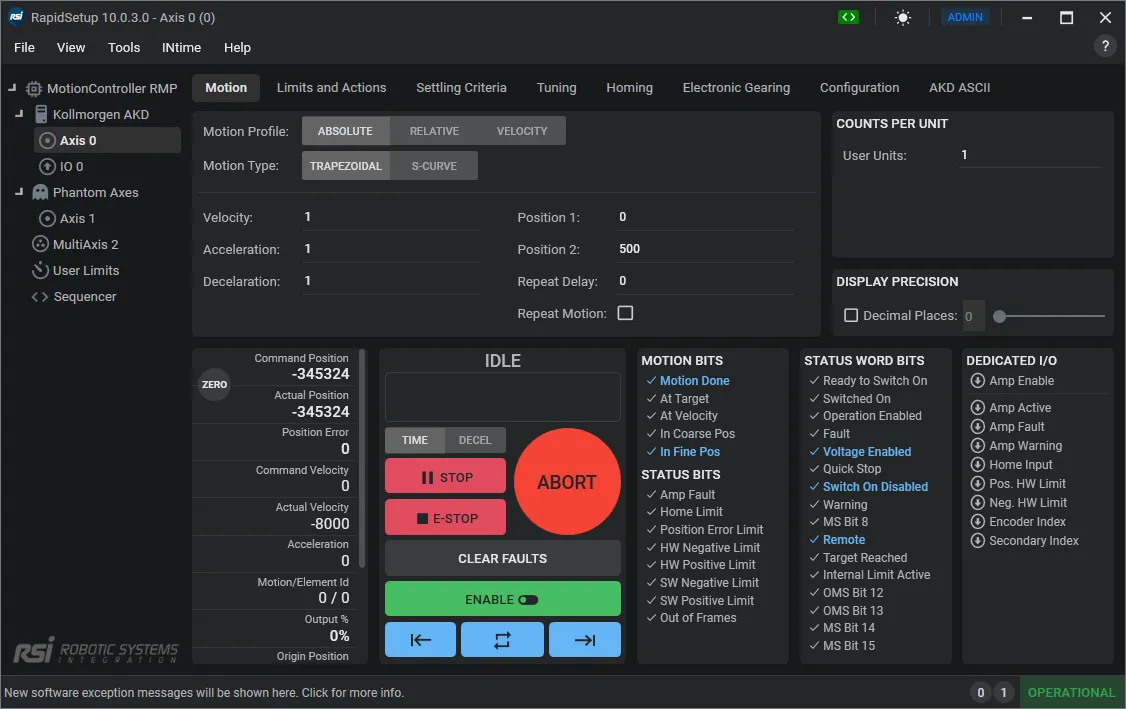
改进的动作控制台
RapidSetup 在更好地组织动作游戏机的各个方面。RapidSetup 具有简约的树视图格式,可以轻松地查看,尤其是在所涉和高轴数目中。RapidSetup 还允许工程师重命名各种各样的 Axix 和 IO,从那以后更容易 iControl robot 的多个产品。
6。与件硬无关
RMP EtherCAT® 支持各种 EtherCAT 节点点。OEM 可以用最好的服装、步进和 IO 硬件来最大限度地提高 ROBOTRELINECONSIBLE。
7。创新
RTTasks 和 RapidCodert
OEM 可以在固件 (RTOS) 中运行用户代码块。这个大提振了机器人本能。
机器人
OEM 使用 RMP 添加机器人来处理机器人看护。通过这种方式,集成的运动控制器可以处理所有的机器人任务。
快速分析快速分析 (即将推出)
OEM 可以跟踪跟踪和分析全球发货机器人的吞吐量。这些数据可以帮助在任何轴上发生故障,前接触者预先检查服务调用。