Overview
A collator for wood chip stacks for retail displays of stains on different woods. Basically a pick-and-place.
Solution
The customer selected RMP EtherCAT Motion Controller to command motion and trigger basic IOs in an attempt to control several things - the main lifting axis that runs a drive shaft to climb a rack on both sides. The process keeps the level of the chips always within reach of the suction cups. The second axis and the third axis moves the chips from the back hoppers to the drop points on the table by dropping down to contact the surface of the chips, applying vacuum and then lifting and moving the chips out to the table.
For motion, the customer used simple Point To Point motion (Trapezoidal Movies). The customer controlled IO using IOPoint class.
Testimonial
”Once I understood just how ingenious the RSI RapidCode scheme was it was an easy decision to make. Having a dedicated Ethernet Port that handles all communication to the drives is the exact way to go. RSI’s software approach made a superior product because I just wrote an interface and obtained all my data from the RapidCode libraries running in the background.”
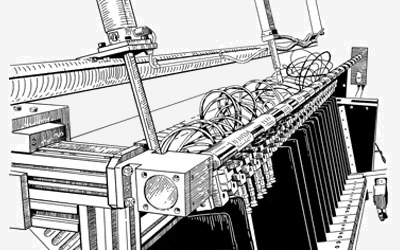
Gallery
See images of finished system below: