Overview
Polishing aluminum and other metals to a mirror finish is extremely labor intensive. There are several steps to the process and each requires a lot of pressure with heavy buffing equipment. Large Polishing jobs like tanker trucks or airplanes would nearly be impossible without the assistance of an automated system. Our customer and RSI worked together to design an interface which enables operators to quickly polish a tanker by controlling the cartesian and AGV using an intuitive Pendant and Xbox controller.
Solution
Hardware Selection
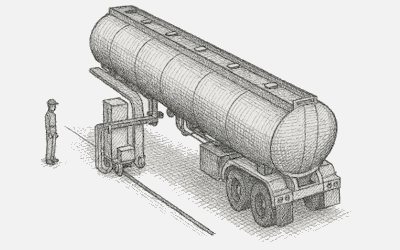
The proposed solution includes a customized Robotic AGV Platform that navigates along a magnetic tape on the floor on a straight line parallel to the tanker trailer.
The custom robotic AGV has a vertical mast with custom buffer arm and tooling so it can polish both the top and bottom of the trailer.
Application Software and HMI Development
RSI designed an intuitive user interface using an Xbox controller; enabling operators to maneuver the robot tooling across the buffing surface and around obstructions. The PC based application included a semi-automatic mode where the robot would “re-trace” paths to reduce polishing time.
Services Provided by RSI
RSI will provide all necessary hardware including: Robotic AGV platform, buffer arm tooling, controls, drives, motors, cables, cable tray, IO, sensors, electrical enclosure, operator pendant, and safety equipment.
120V AC supply will be required to power the Robotic AGV platform. RSI will include a cable tray that supports and protects the supply cable along the floor.
RSI will design and develop a custom Software Application and User Interface as outlined within this proposal.
The Software application will give users manual control through a handheld teach pendant. It will also allow users to define a 4 point rectangular area and the robot will polish the area automatically.